一、项目背景
在型钢的轧制过程中,经过矫直机矫正后的轧件需要检查其侧左、右,以及上、下方向的弯曲度。而在测量检查上、下弯曲度前,要用带叉头的翻钢撬棍把轧件翻转90度。由于一根轧件重达上千斤,在人工操作撬棍翻转过程中,它的反作用力是非常大的。当操作者力量不够,不能完全翻转轧件时,轧件回转,操作者容易被撬辊反弹打伤,导致此作业过程存在较大安全隐患。
二、问题分析
要使“反弹力”降低,在钢材重量一定的情况下,就要增加翻钢撬棍的长度,利用杠杆原理来减少使用过程中的反弹力。但是如果撬棍太长,在操作者身高一定的情况下,既不方便职工操作(或者说在撬棍在操作者身高一定的前提下,也不可无限制增长),再者撬棍的制造成本也增加了。
原现场用普通撬棍作用力示意图1。
三、矛盾描述
在翻钢撬棍中存在的物理矛盾是,对撬棍既希望它长,又希望短。从操作容易减小反弹力来说需要撬棍长,但是在节约成本方面考虑又希望可以短点。
四、根据发明原理提出解决方案
运用了TRIZ理论《解决物理矛盾引导表》,针对编码为3的通用工程参数“运动物体的尺寸”,查找了对应的发明原理为17、01、03、35、14、04、15。通过比较筛选,我觉得15这个方案是比较可行的。15就是40个发明原理当中的第十五个原理—动态性原理。那么如何应用动态性原理呢? “将钢性不活动的物体变为可活动的、可移动的或具有可自适性的”。应该将什么物体变为可活动的呢?显然就是翻钢撬棍的叉头了。
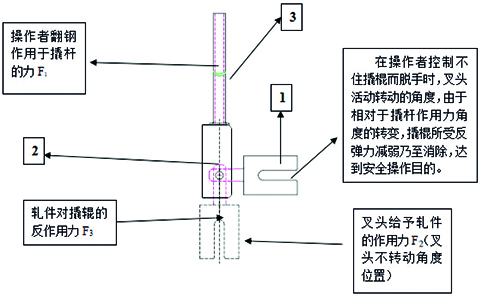
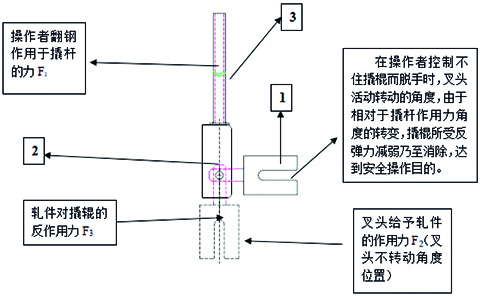
图2 翻钢撬棍改造后的作用力示意
五、现场应用情况介绍
具体做法是把翻钢撬棍中叉头与撬杆的固定连接改为由销轴连接,不固定并可根据受力活动,这样使得叉头在工作过程中可以在一侧活动一定角度。当操作者力量不足以控制住撬棍反弹力而脱手或者在翻转到位松劲时,叉头活动转动的角度能很好缓冲减弱反弹力,很好地保证了操作者的安全。采用本发明的翻钢装置已在生产中进行了试用,取得了很好的效果。
该方案已经申报了专利,名称为“一种灵活安全翻钢装置”。
附图说明
图2是本发明的示意图。
其中,1是叉头,2是定位板,3是撬杆。
使用其翻钢时,由于受力叉头部分如何灵活转动一个角度,缓冲减弱消除反弹力的示意图。
六、项目效益
经过如此改造后的翻钢撬棍,在实际生产中提高了使用的灵活性,大大降低了操作过程中的安全风险。由于工具使用方便了,可以在第一时间内检查出产品的弯曲缺陷,进行及时矫正调整。由此,矫直废品大大降低,不仅增加了效益,而且由于产品过硬,也取得了很好的社会效益。而最重要的时,由于改造确保了操作者的安全,这才是无价的经济效益。