本刊记者/刘成成
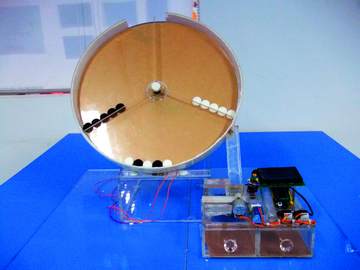
棋子分选转盘
时下,围棋和五子棋已成为许多中老年人休闲生活的重要组成部分,然而由于年岁大、眼神不好等原因,分捡棋子耗时长、精力体力消耗大。为此,第二实验小学的陈天琦同学特地邀请同学殷明德共同研制了一个可以分拣棋子的小机器人,以使长辈们的休闲生活更加轻松、惬意。
该机器人的设计分为棋、转盘和三个挡板几个基本组成部分,由直流电机带动转盘旋转的同时三个挡板跟着旋转,由于重力的作用和管道口的尺寸设计使每次只有一个围棋子落到管道中,由此攻克了技术难点—棋子逐个分别落下来。接着,运用步进电机带动传动装置左右移动以实现对棋子的接收,进而由光电传感器将信号传递给单片机进行颜色判断。棋子落到挡板后,通过旋转将检测完的黑白棋子分别装到特定的两个容器中,若检测到没有棋子或者是有黑棋子,挡板往一个方向旋转;若检测到有白棋子,挡板往另一个方向旋转,从而实现了对黑白棋子的分拣功能。
一、工作原理及特点
1.分选转盘利用围棋薄而圆的外形特点,使棋子在重力作用下逐个分别下滑到管道中,整齐排列等待分拣;
2.步进电机准确地将棋子推送到光电传感器所在位置进行检测;
3.光电传感器准确地判断棋子的颜色并通过程序控制可旋转的挡板,将黑白棋子进行分拣。
二、构造及工作流程
1.主要构件
(1)主体结构部分:转盘、连接管道、棋子分拣部分和收纳盒;
(2)棋子分拣判断部分:一个STC89C52单片机、两个5V步进电机、一个步进电机驱动模块ULN2003、一个减速直流电机、一个5V电源。
2.基本组成及工作流程
(1)棋子分选转盘
选用直径22毫米,高度5.9毫米的云子围棋,根据这些参数来设计棋子管道的宽度和高度。在分棋转盘上设置三个挡板,与直流电机带动转盘旋转一同旋转。由于重力的作用和管道口的尺寸设计,每次只有一个围棋子落到管道中,从而实现了棋子逐个下落。
(2)黑白棋子检测部分
检测部分采用可以识别黑白颜色的红外光电传感器,并在程序中进行了相应的处理,把没有棋子和有黑棋子这两种状态视为一种默认的状态,把有白棋子这种状态视为工作状态,当有白棋子到来的时候,触发中断,即可实现对黑白棋子的区分。
(3)黑白棋子分拣部分
运用步进电机带动传动装置通过左右移动实现对棋子的接收,并加设一个可以旋转的挡板。棋子落在挡板上后,通过旋转,将检测完的黑白棋子分别装到两个盒子里。当检测到没有棋子或者是有黑棋子的时候,挡板往一个方向旋转;当检测到有白棋子的时候,挡板往另一个方向旋转。
三、科学性和实用性
1.科学性
(1)利用力学原理,设计有落差的外形结构和步进电机推动,实现棋子准确移动;
(2)利用光电传感器和触碰传感器判别颜色等功能,实现对黑白棋子的区分;
(3)利用可以分别向左、右旋转的挡板,实现黑白棋子的分拣,并根据分拣结果,显示每种棋子的数量;
(4)利用液晶显示屏单片机进行计数功能,并统计棋子个数,避免丢子或少子的现象产生。
2.实用性
该机器人构造简单,制作材料价格低廉且不易损坏,可广泛应用于家庭、社区、老年活动中心等场所,具有极为广泛的实用性。