履带式底盘的应用十分广泛,常被用于坦克、挖掘机等重型载具上,以充分发挥承重大、地形适应度高、驱动力大等优点。然而,传统履带式底盘的越障高度会受履带高度限制,面对落差极大的极端地形,无限制地提高履带高度显而易见是不现实的。因此,我提出了两段式履带越障底盘的想法,并尝试实施。
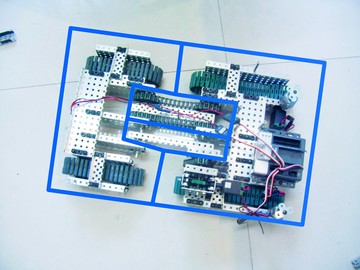
通过努力,我成功做出了基于VEX机器人零件的模型,试验并取得了初步的成果。
此模型分为四大部分:前半部、后半部、抬升臂以及连接臂。在设计上,最为重要的连接臂部分,我采用了链条传动的方式以保证前半部和后半部始终保持平行,这是为了在翻越障碍时不从障碍物上方滑下。在搭建过程中,我也曾考虑过使用平行四边形连杆结构,但考虑到抬升过程中上下两杆可能会挤在一起,限制前半部分抬升高度,而且这种设计占用空间较大,最终没有选择。
另外,抬升臂动力的提供方式上,我一开始采用的是马达直连的方式,后发现马达力量不够,便减小了传动比。但如此改进后我又发现了新的问题:由于前半部过重,抬起后如果马达不继续提供动力,前半部便会下落,不能保持正常位置。而如果让马达继续以小马力转动的话,尽管能使前半部保持在正常位置不下落,但是马达会在短时间内快速升温,甚至烧坏。对于这样一个棘手的问题,我的解决方法是采用蜗杆、齿轮传动。蜗杆、齿轮传动的特点就是只能由蜗杆带动齿轮、而不能由齿轮带动蜗杆。这样做既能防止前半部下落,又能提供较小的传动比。
在细节上,由于VEX金属零件的孔是方形的,且边长大于螺丝直径,直接用螺丝固定会造成滑动,进而引起很大的误差。所以我大量使用了轴承片,因为轴承片是一种带孔塑料零件,每个孔直径和螺丝相同,且在孔周围有四个突起用来嵌进方空以固定,最大限度地减小了误差。为了防止底盘前半部抬起后底盘前倾,需保证重心保持在后半部,于是我将后半部设计的比前半部稍大一些,将控制器、电池等物品安排在后半部,甚至使用大螺母进行配重。
关于此底盘越障的步骤,大体可分为前半部分抬起、行进至障碍物前、前半部分下压、越过几个步骤。
这种底盘尽管功能已较为完善,但仍旧有很大的改进空间。目前我主要提出了如下几 种想法:第一,马达的数量应增加,以提高越障的速度;第二,本底盘目前虽然结构较为简洁,但可维护性较差,如果出现故障,维修起来很不方便,可以尝试模块化等方法提升可维护性;第三,抬升臂和连接臂可以升级为可伸缩型,以进一步提高越障能力。
责编/刘成成