人类目前还无法准确地预知地震的发生并采取预防措施,大多是在震后实施救援。这样的现状,使得地震发生后能迅速有效地实施救援工作显得愈加重要。
灾难发生之后存在一个“救难黄金72小时”,在此时间段内,灾民的存活率极高。每多挖一块土,多掘一分地,都可以给伤者生存的机会。但是在地震发生之后,房屋道路往往破坏严重,大型机械无法进入到坍塌的房屋内部展开有效救援。一次主震发生后,还会有一系列的余震发生,不仅会对进入救灾现场的救援人员造成伤害,还会阻碍救援工作的开展。
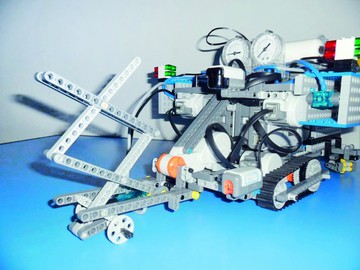
地震救援机器人T
为了减少不必要的人员伤亡,提高震后救援的效率。辽宁省大连市第九中学的张文超、王玉玠、陈海诺同学在赵玉梅老师和许钦泊老师的指导下设计制作了地震救援机器人T。地震救援机器人T可以在灾后最短时间内进入坍塌的房屋中,自动寻找被困人员,并实施救援。
在制作救援机器人过程中,创意小组遇到了很多的问题,经过不懈努力,这些问题被一一解决,使得地震救援机器人T最终达到了设计目标。
首先,为使救援机器人能够适应灾后复杂的地形环境,创意小组将机器人设计成履带驱动方式,使它具有良好的爬坡性能,可以在灾后凹凸不平的路面上行动自如。
在实现机器人能够自动寻找被困人员的功能时,起初,创意小组决定用温度传感器来作为寻找生命体特征的搜寻装置。但是实验当中发现传感器温度上升或者下降的时间和过程非常长。这使得机器人无法在短时间内检测到有效温度。后来通过联想红外线体温计,选择使用红外线传感器。通过红外线传感器进行扫描,可以在较短时间内确定生命体特征的位置,达到快速确定救援方向的效果。
最难实现的是如何将压住被困人员的废墟抬起。创意小组发现复合式杠杆可以用较小的力量将废墟抬起,但如果直接用马达驱动复合式杠杆,不但会导致马达翻转,甚至能使马达卡住,影响救援。经过多次试验后,创意小组选择使用气动力作为驱动复合式杠杆的动力源,用马达带动气泵,在储气罐储存足够的空气,用另外一个马达控制气阀,最后用气缸使复合式杠杆抬起。这种能量传递方式,能有效防止抬起废墟后,废墟重力过大造成的下压情况。
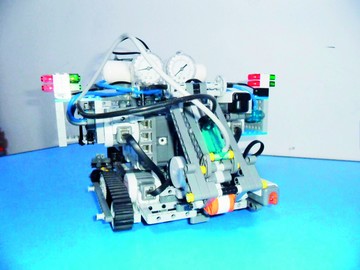
地震救援机器人T正面图
解决将废墟抬起的问题后,创意小组又遇到了新的难题。由于创意小组使用的主控器是乐高头脑风暴系列NXT智能模块,它只有3个马达输出端口,无法同时满足控制机器人行进和控制储气罐储气、操作气缸气阀的要求。创意小组决定使用两个主控器进行控制,一个主控器负责完成搜寻被困人员方向、使机器人自动运行到营救位置;另一个主控器负责完成储气罐储气,控制复合式杠杆的运动方向和运动位置,通过操作气阀方向来驱动复合式杠杆,完成抬起废墟的任务。两个控制器之间用蓝牙通信,实现两套独立操作系统之间的联络和互动。经过对程序的反复调试,创意小组用蓝牙通信时多发送单接收的方法解决了两套系统间蓝牙信号接收成功率不高的问题,将两套独立的控制系统变成了一个统一的整体。
地震救援机器人T研制成功以后,创意小组反复对运行程序进行了调试,保证其运行的准确性。