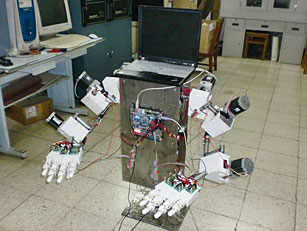
上肢系统整体结构实物照片
机械手实物照片
人的上肢系统非常特别,具有智能抓取物体和搬移物体的重要功能。本项目基于仿生学原理和机器人运动控制技术,将机器人运动学技术、欠驱动技术和微机控制技术融合到一个拟人性非常强的机器人上肢系统中,实现一台机上智能抓取与操作两个系统融合。该系统不仅能够准确实现事先规划好的空间姿态和动作,还能够在抓取物体时自动适应被抓物体的不同尺寸和形状,具有一种特殊的自适应能力。在机械装置方面,本项目以设计者的并联灵巧自适应发明专利为核心技术;在微机控制方面,本项目以FPGA为核心,通过控制模块、驱动模块和用户模块,并依托机器人运动学成熟技术,综合实现对该系统的高效控制。
本项目倾力打造一个展示度更好、科技含量更高的智能抓取机器人上肢系统,如上图所示。该系统能够普遍应用于各种服务移动机器人,与之构成相当实用的机器人系统。该系统具有两只3自由度机械臂和两只14自由度机械手,总自由度数达到34个。每只机械臂由3个步进电机驱动,由3个高度模块化的空心轴关节组成,实现轴内的灵活布线,以节省布线空间,提高机械臂装置整体性能;通过对关节自由度的灵活组合,使机器人上肢系统可以在较大空间实施操作。每只机械手由10个直流电机驱动,各手指结构相似,手指在抓取前可以灵活弯曲中间关节以实现良好的准备姿态,抓取时则可以自适应物体尺寸。机械手结构紧凑、模块化程度高,外观、形态动作接近人手,几何尺寸与人手接近(大约为正常人手的1.0~1.2倍)。
该系统控制部分以上位机控制FPGA,通过硬件描述语言实现对硬件的编程控制,并通过驱动模块对用户模块实现手动实时控制和编程自动控制。此外,该控制系统依托机器人运动学成熟技术,可以实现空间动作的精确规划,综合实现对上肢系统的整体控制。本项目团队开发了该系统的直流微型驱动模块,并使其嵌入手掌之中,结构紧凑、稳定性高。通过控制部分与机械部分的协调配合,可以实现对较大空间内物体的抓取和较灵活的空间动作。
该系统不仅实现了较灵活的空间操作,而且提出了手部抓取的新型动作模式—并联灵巧自适应模式。该模式在较低控制与传感要求的基础上,保证了较高的抓取拟人性;所发明的柔性腱绳牵拉机构,可以巧妙实现柔性件的双向驱动作用,为进一步实现仿生肌肉、肌腱的研制提供了思路。
该机器人上肢系统可以实现人类上肢的诸多功能,具有高拟人化、高模块化、灵活性高、抓取自适应能力强、能耗小、维护容易、控制难度低、造价低廉等优点,有很好的市场应用和实验研究前景。
本项目已获得2009年国家大学生创新性实验计划立项支持,并荣获清华大学第二十八届“挑战杯”学生课外学术科技竞赛特等奖。
责编/刘 路