摘要:系统设计过程中的概念设计是关键阶段,通过对系统的功能-原理分析建立系统架构,系统架构决定了后续系统开发的工作难度。公理设计理论为设计过程分解提供了理论依据,应用功能独立性公理的分析框架,通过在功能域和结构域的“之字形”映射变换,进行功能结构分解,建立相对独立的产品功能结构等级树。根据设计分解得到的功能结构等级树、完整设计矩阵和产品设计流程图,在考虑产品设计任务之间相互影响关系的前提下,确定其顺序及其组织形式,从而构建系统架构。本文用该方法对智能船舶的锚泊辅助决策系统的开发进行分析,建立相对独立的功能架构,降低系统的复杂性并优化系统。
关键词:公理设计;产品设计过程重组;并行工程;锚泊;辅助决策
引 言
船舶在进行检疫、候潮、锚地过驳、避风、等泊位等情况下,常需抛锚停泊。而锚泊船由于受风、浪、流等外力因素的作用可能发生走锚,从而导致碰撞、触礁、搁浅等事故发生。
公理设计是一种基于数学原理的设计理论,通过数学原理的描述或符号化处理建立数学模型或设计方程和基于规则的方法,实现产品的功能属性到结构属性的复杂设计过程。本文是基于公理设计辅助进行智能船舶的锚泊辅助决策系统的开发,能够更好地对船员提供信息及进行操作指导,尽量去除锚泊操作的人为不利因素,提高锚泊安全性。同时也为将来更进一步的智能化锚泊奠定基础。
智能锚泊辅助决策内容
随着海运事业的不断发展,船舶数量不断增加,锚泊事故也有上升趋势,走锚会导致船舶碰撞、触礁、搁浅等重大事故的发生。影响锚泊安全的主要因素有:首先,船体条件是影响锚泊安全的因素,包括船龄、船舶吃水、船舶吨位、主机和舵的性能等。其次,锚地条件对锚泊安全也是不可忽略的,不同的锚在不同地质的抓力,锚地水深,以及锚地风、浪、流等环境,以及锚地周围锚泊船数量和位置对锚泊安全影响很大。另外,锚的系留力、出链长度和卧底链长的选择、锚泊方式直接决定了锚泊安全性。总之,锚泊时,锚泊力是有限的,船舶不利的偏荡运动导致锚链张力成倍增加,是走锚的主要原因。
通过分析影响锚泊安全的因素,并且通过对外界环境、船舶自身及设备和锚泊状态的监测,进行受力分析、估算、判别等,给出锚泊建议和对锚泊安全监测及报警,并给出辅助决策,给出锚泊操作者准确参数及建议,以确保船舶的锚泊安全,目的是提高锚泊安全以及法律证据留存。
公理设计的辅助进行系统规划设计
公理设计是20世纪90年代,美国麻省理工大学的Nam Suh教授提出的关于设计领域的科学理论,总结设计制造领域的理论规律。公理设计规范了设计分析过程,指导设计人员正确进行设计决策,判断设计质量优劣。设计是“想得到什么”和“如何选择以满足需求”相互作用的过程,公理设计在相邻两个设计域的“之字形”映射变换将这种相互作用紧密地联系在一起,左侧设计域是设计者的目标,右侧设计域是设计者实现目标的方法。通过相邻的设计域之间的“之字形”映射变换,就可以建立功能要求、设计参数的等级结构,而且也相应地分析了每一级的设计变量的相互影响关系,确保其满足功能独立性公理的要求。
本文将公理设计的分析过程模型与产品设计过程重组模型结合,建立公理设计辅助的系统规划设计模型。包括系统功能结构分析、定义系统功能模块和系统架构设计等。确定准耦合功能关系,按序进行设计。
基于公理设计分析智能锚泊系统设计过程
公理设计的设计顺序是从最高级出发,把基本功能要求分解为不同的子功能要求,直到整个设计任务完成,得到一个从抽象到具体的系统结构。首先应用公理设计,从需求出发确定基本功能,通过“之字形”映射变换,并以设计公理作为理论依据得到系统等级结构和流程图;然后从等级结构的最底层入手,从低到高地组成最基本的系统模块预期的功能。
3.1 应用公理设计的框架对智能船舶的锚泊辅助决策系统进行分析
从公理设计角度,要求智能船舶的锚泊辅助决策系统实现的总体功能是对锚泊系统的监测报警和辅助决策,为船舶操作者提供有效的建议,因此设计约束是保证锚泊安全。智能船舶的锚泊辅助决策系统的基本功能要求是FR:监测、报警和辅助决策;总体设计参数为DP:参数采集、计算分析、监控报警、辅助决策;设计约束CS:保证锚泊安全。
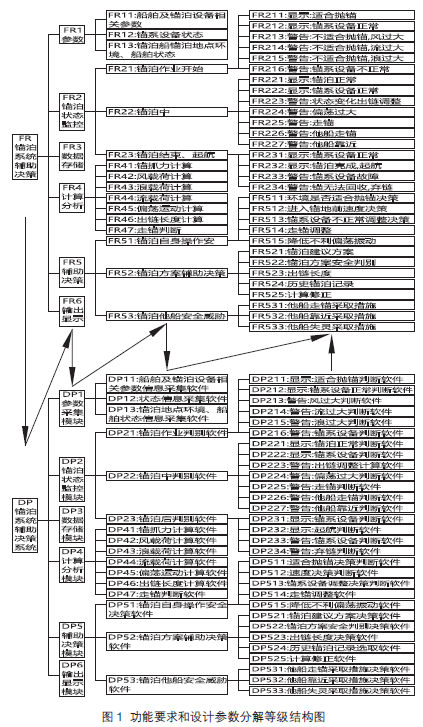
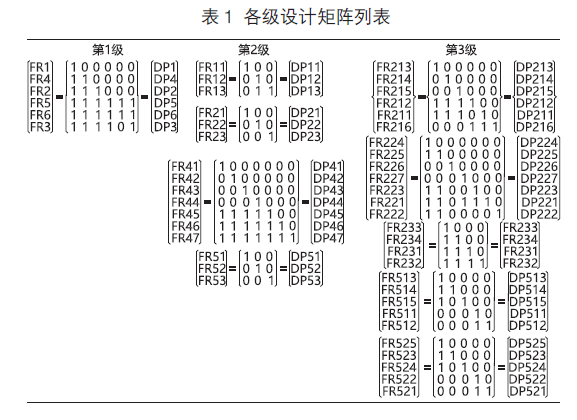
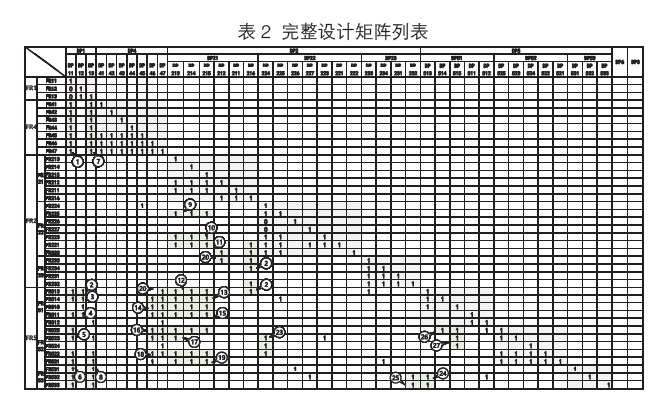
应用公理设计的分析框架,在功能域和结构域进行“之字形”映射变换,得到智能船舶的锚泊辅助决策系统的功能结构等级数(如图1)、每一级的设计矩阵(如表1)和完整设计矩阵(如表2)。
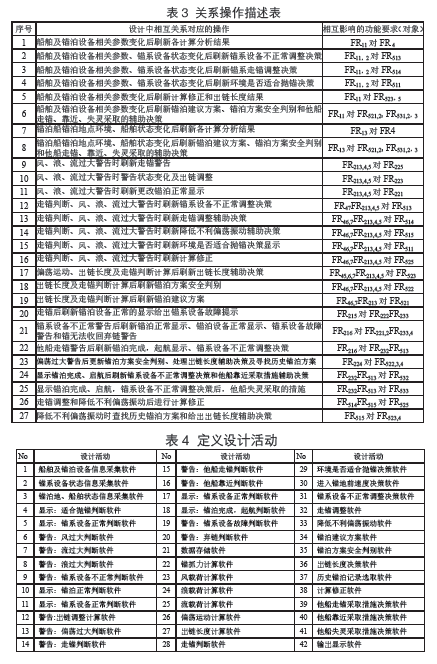
设计矩阵和完整设计矩阵的元素“1”表示该元素所对应的功能要求受到其对应的设计参数变化的影响,即间接地描述了两个功能要求之间的影响关系;元素“0”则表示两者之间没有相互影响。完整设计矩阵的非对角线元素表示同一设计分解分支的功能要求之间的相互影响关系,其余部分则表示不同分支的叶功能要求和叶设计参数之间的影响关系,关系操作描述如表3所示。
3.2 根智能船舶的锚泊辅助决策系统架构设计
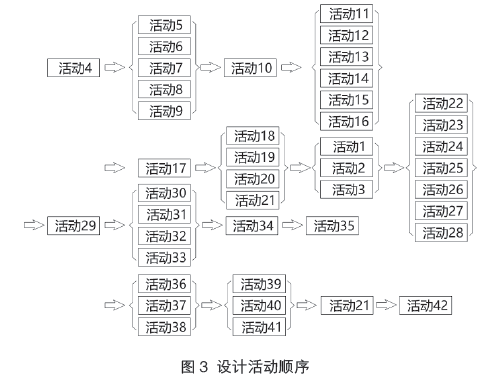
智能船舶的锚泊辅助决策系统结构等级树描述了智能船舶的锚泊辅助决策系统的组成和各个具体目标。设计活动就是实现这些目标为目的,组织多学科的设计开发队伍,应用自身的专业知识和经验,完成设计任务,实现设计产品预期功能。根据设计分解结果,智能船舶的锚泊辅助决策系统开发定义了42个设计活动,如表4。
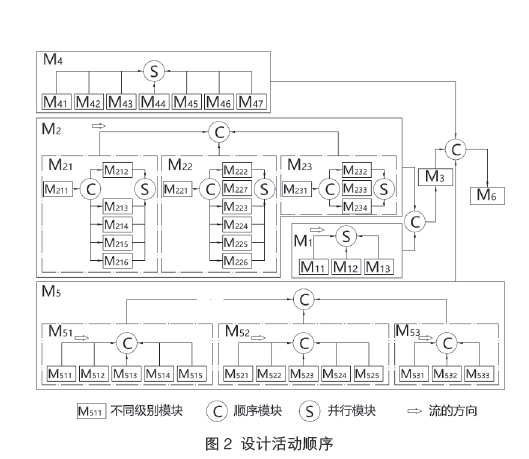
通过分析,总结出一个描述智能船舶锚泊辅助决策系统设计顺序的流程图。根据智能船舶锚泊辅助决策系统设计的流程图(图2),确定设计的顺序(图中的M代表设计参数,即各个级别的设计参数看成不同级别的模块)。整个智能船舶锚泊辅助决策系统由五个顺序模块M2锚泊状态监测报警模块→M1信息采集模块→M3数据存储模块→M4计算分析模块→M5决策辅助模块→M6输出显示模块组成。根据各级别设计矩阵和产品的等级结构树,建立产品的设计流程,如图3所示,通过分析完整设计矩阵和设计流程图确定设计活动顺序。
智能锚泊辅助决策系统架构设计
基于上述分析,智能船舶锚泊辅助决策方法系统的架构,包括一个工作站、一个信号采集单元以及一个输出显示单元,信号采集单元包括船舶参数采集子单元、锚系设备状态信息采集子单元和环境船舶状态数据采集子单元,分别用来采集环境、船舶以及锚系设备的实时信息。
由信息采集单元采集所需数据及信息,分别提供给工作站中的锚泊状态监测报警单元、计算分析单元、辅助决策单元和输出显示单元。计算分析单元进行计算后,提供计算结果给锚泊状态监测报警单元和辅助决策单元,用于报警和辅助决策的分析。在收取到锚泊状态监测报警并反馈给辅助决策系统后,船舶操作者改变了船舶的操作,计算分析模块通过信息采集模块数据重新计算,并将计算结果反馈给监测报警和辅助决策单元,重新对报警和辅助决策进行分析。全部模块数据在存储模块中存储,根据船舶操作者的需求选择在输出显示单元中显示环境状态、船舶状态、船舶设备参数、锚系设备状态、锚泊状态监控报警、锚泊建议方案、锚泊辅助决策、锚泊记录、船岸互联等信息。
结 语
本文是在船舶智能化、自动化快速发展的背景下,根据智能船舶锚泊系统的需求,结合相关技术文献及资料,进行的智能船舶锚泊辅助决策方法及系统设计。得出了系统的架构及以下结论:
(1)智能船舶锚泊辅助决策系统包括数据参数采集模块、锚泊状态监测报警模块、计算分析模块、辅助决策模块、存储模块等通过数据处理模块进行数据信息的交互与处理,经输出显示模块进行显示和输出。
(2)通过多个计算公式均输入计算分析模块中,也可将相关软件嵌入到计算分析模块中。根据已知的计算方法进行多重计算及分析,通过计算结果和实际状态以及历史数据对比优选,并最终得到理想结果。
(3)通过辅助决策模块与数据处理模块数据交互及其自身程序,实现锚泊建议方案、锚泊安全判别、走锚后采取措施、出链长度、锚泊信号等辅助决策等功能。
责编/马铭阳
