
期刊-2013-03

类海蜇运动探测体
文泉州市第七中学 李灿昭 指导老师杨利 陈思 梁良飞
2013年03月01日

为了能更好地进行水下科考探测活动,我们设计了一款有别于机器鱼和潜水艇的水下探测体。海蜇的形体及稳定的运动特性更适于水下狭缝和沟壑区域的探测、侦查及紧急避险等。本研究利用海蜇的形体结构和运动模型,对海蜇进行力学仿生,采用合适的材料制作机器人的机械结构,选择合适的驱动方式并加载摄像头和各类传感器。
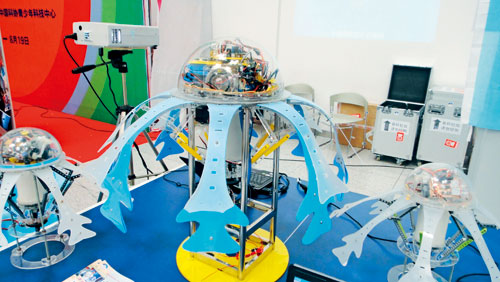
海蜇运动探测体分为两个主要部分:球冠状头部和连设在该球冠状头部的下方的腔体,以及若干个均匀分布在上述球冠状头部四周围的模拟海蜇触手的翼展。
球冠状头部设计:球冠型头部呈伞状,可以减小运动过程中水的阻力。它采用亚克力透明材料做顶盖,切面部分分布了16枚紧固螺丝,把防水密封圈压实。切面的中央与电池仓、主轴电机等部分相通。球冠状头部内设有主控器和摄像模块、用于与上位机无线传输的无线通信模块、分别用于控制探测体升降和水平运动升降沉浮单元及水平推进单元。主控的数据端连接有探测用的传感模块,控制端分别与摄像模块、升降沉浮单元及水平推进单元的输入端相连接。
翼展的设计:海蜇的触手数量多,项目设计中把海蜇的触手简化为8个翼展围绕在球冠型伞体周围,利用连杆的方式与主轴连接。每一个翼展的运动都类似划船的桨,合适的速度和摆动幅度可以起到对姿态和方向的控制。利用CorelDraw软件设计翼展的形状。为保证翼展在水下运动过程中有合适的刚性,采用流线的双层翼展结构,使用激光雕刻机在厚度为0.5mm的软硬适中的塑料膜片上进行雕刻,把上下两层的翼展通过螺丝、垫片进行紧固。设计双层翼展能分别活动铰接在球冠状头部的四周围处,展翼下方装有中央控制器控制的能使展翼上下挥动的连动机构。连动机构包括涡杆、滑动件及若干支架,涡杆设于球冠型伞体下的腔体内部,其上端与一主力电机的输出轴相连,下端向下伸出腔体外,末端滑动件和连接器随涡杆转动而上下运动,从而带动相互活动铰接的3条支架骨运动,通过程序中的不同命令分支来控制实现展翼的运动形态。
探测体能实现上浮、下沉、水平推进等动作,运动过程稳定;可以实现避障,对强烈的碰撞能做出及时的避险反应,避险效果明显;能实现大小不同型号的探测体动作配合。地面控制界面能稳定实时显示水下画面和各个传感器的实时数据。模仿海蜇的形体结构设计外观,具有多种不同的运动模式,搭载机械臂和摄像头,探测水底浑浊度、温度等传感器。探测体模仿海蜇在水下紧急躲避敌害的方式,遇到特殊情况如光照、触碰等快速启用预设的避险程序并躲离现场。探测体拥有大小两种型号,可以组成群体,由地面控制端发出指令,实现不同机器间相互通信,共同配合完成任务。
该项目研究有着广阔的应用前景。该设计适用于各种有特定要求的水下科考探测活动,克服了传统仿生鱼探测体空间小、体态不稳定、探测性能不佳等问题。它对我们掌握目的地的水文、考古、生物分布等重要信息有着重要的意义。
类海蜇运动探测体获得第十二届青少年机器人竞赛创意组一等奖。
责编/欧阳雪