
期刊-2010-09

全自动智能化树干涂白机
设计者上海大学机电工程与自动化学院 李喆 李居峰 杨浩 责编李玉戌
2010年09月01日
随着绿化覆盖面积越来越大,每逢秋末冬初,我们随处可以看到,为了让树木安全过冬和防治病虫害,园林部门工作人员开始忙碌地给树木涂白。我们考虑是否可以用机器来代替人工完成这项工作,从而节省劳动力,提高生活质量,于是便申报了该项目并获得国家大学生创新性实验计划支持。
此项目志在研制出一台全自动智能化的树干涂白机,该机器可以对人行道旁的树木快速、高效地喷涂石灰溶液;在提高工作效率的同时,节省劳动力,实现绿色环卫的目的。由机器人来代替人工进行工作是这个时代的趋势,该项目也可以说是弥补了机器人在这一领域上的空白。项目所设计的喷涂方式节省涂料、更加优化涂刷效果。经过最终测试,所研制的涂白机从寻找树木到完成对一棵树木进行全方位喷涂的工作不到30秒钟的时间,而人工涂刷则至少需要3分钟,达到了设计的目的。
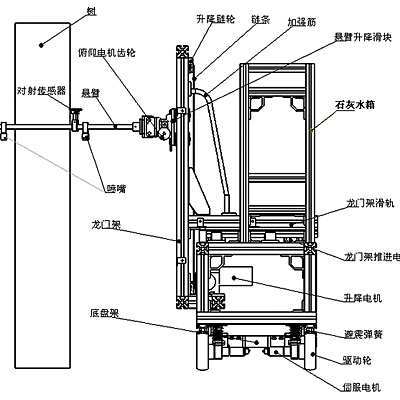
图1 涂白机机构
在机械设计上,涂白机结合机电一体化技术,主体喷涂机构由喷涂机械手臂、龙门架及对应的支撑运动等部分组成(见图1)。其中喷涂机械手臂是喷涂部分的主要结构,其上装有激光传感器和喷头,在俯仰关节的带动下,喷涂机械手臂可以进行俯仰运动从而实现喷涂机械手臂的收放,以便在行走过程中放下手臂,减少机构的空间占用。激光传感器的作用至关重要,其中一对用于检测树与涂白机间的距离。喷涂机械手臂可以在纵向运动机构带动下与龙门架一起,实现喷涂机械手臂伸缩运动以调整机器人与树木之间的距离;另一对激光传感器安装在龙门架上用来检测人行道上的树木及树木的粗细,同时给出图像处理的信号;而喷涂手臂可根据检测到的信息进行张开闭合运动,来适应树木的粗细。喷涂机械手臂也可以在链条的带动下沿龙门架上的导轨上下运动,在上下运动过程中对树进行喷涂。主体喷涂机构安装在带有四轮的移动小车上,小车具有避震机构,其转向利用左右轮速差实现。在小车的两侧及前方装有超声波传感器和摄像头用以检测障碍物、路沿及树木。整体模型如图2所示。

图2 整体模型
在控制方面,涂白机以plc(可编程控制器)作为下位机的核心控制系统对机器人进行实时控制,同时,在下位机也采用了触摸屏,提供手动控制。上位机则使用PC机通过无线RS232串口与下位机相连,实现对机器人的远程监控。在控制中还建立了视觉处理系统,利用机器视觉判别树木和轮廓提取,攻克了智能识别树木以及自动避障等技术。控制系统结合激光传感器、超声波传感器以及视觉处理等功能,使得机器人具有自动行走、定位、检测并识别树木以及避障等人工智能,实现涂白机工作全过程的智能化。
目前,该机器人已基本实现预期目标,可沿着人行道进行自动行走,寻找并识别树木,当检测到树木时则进行全方位的喷涂工作(如图3)。

图3 实际喷涂过程
本项目于2008年11月成功申报为国家级大学生创新实验项目,项目在2009年参加上海市首届大学生创新论坛与第二届全国大学生创新论坛,均被评为十佳项目。项目成功入选2010年全国教育成果展与第十届科技活动周开幕式展出。