
期刊-2009-12

武警部队车载GPS终端改进设计的研究
文/国防科大计算机学院 于锐 朱培栋
2009年12月01日
一、引言
目前,世界各国都在推进新军事变革,实现从机械化向信息化的转型。国家综合国力的增强和改革开放的深化给武警部队后勤信息化建设提供了发展条件,武警部队担负的繁重“处突”、“维稳”任务给后勤信息化建设提出了新的更高要求。目前,在武警总部党委的正确领导下,武警部队后勤信息化建设已经做了一些有益的探索,并取得了可喜的成绩,为部队圆满完成各项任务奠定了坚实的基础。
武警部队运输综合管理信息系统已初见成效,随着全球卫星定位系统、全球移动通讯技术、地理信息系统等先进技术的运用,武警部队的运输保障任务将逐步实现动中通(三通:数据通、语言通、图像)。在武警部队运输综合管理信息系统中,车辆监控定位子系统是最重要的组成部分,而车辆的监控定位又离不开来自车载GPS终端的相关信息,在整个系统的设计中车载终端的设计是最为重要的一部分。现武警部队的车辆已配备了相当数量的车载GPS终端,但是系统运行好坏,信息是否流通,各级人员能否及时取到相应的信息,这在很大程度上就取决于车载终端的设计了。本文对武警部队车载GPS终端进行了改进设计,从一定程度上提高了其效能。
二、车载GPS终端改进设计
在以往的中心决定式车辆导航系统中,车载终端大都未存有地图数据,这虽然节省了一定的存储资源和运算资源,但是也给驾驶员带来了不便,尤其是无法进行实时的路径规划,路径规划只能够在监控中心进行。如闫光辉、孟杰在《基于3G的货物动态跟踪管理信息系统的研究与设计》中,王萌、杨晓云、周坚和、张增芳在《基于GPS/GIS的车辆定位系统设计》中,等等,车载终端采用主控制器控制GPS接收机、GSM无线通信模块、隐蔽报警选件、液晶显示屏等组件;潘峥嵘、陈晓宇在《基于GPS/GSM/GIS的公安专用无线跟踪系统》中,翟战强、蔡少华在《基于GPRS/GPS/GIS的车辆导航与监控系统》中,等等,虽然采用了微处理器,但它们的图形显示功能和计算处理能力受到很大限制,使地图匹配和路径规划无从谈起。
对于武警部队的驾驶员来说,执行任务的过程是一个复杂多变的过程,在这个过程中存在很多的变数,而且很多时候还是在外地,驾驶员对于道路的情况并不是很清楚,他们的目标只有一个,就是安全、及时地到达目的地。在“处突”、抢险任务中,可以说,时间就是部队的战斗力,时间就是生命线。能否及时地规划好行驶路线,对于驾驶员、部队完成任务来说,都是极其重要的。以往的中心决定式车辆导航系统中,驾驶员遇有情况需改变行车路线,再寻最优路径时,需通过GSM网络向监控中心发送请求,监控中心在获取车辆的实时位置后,对车辆下一步的行驶路线进行规划,然后再以短信息的形式通过GSM网络反馈给驾驶员。这一过程比较繁琐,特别是在网络拥塞、监控中心繁忙等时候,很容易造成信息延误、遗失、发错等现象,这与武警部队执行任务时间要求的紧迫性有一定的差距。故本文在设计车载GPS终端时,应用了最新的嵌入式计算机技术,采用基于Windows CE操作系统的导航计算机设计方案,具备强大的图形显示功能和计算处理能力,并且体积小、功耗低、可靠性高,开发平台功能强、共享软件资源丰富、硬件驱动支持多,从而能够充分适应各种环境的特殊要求。
针对以上要求,这里研究的车辆导航系统应具备以下功能:
(1)系统能在90%以上的行程时间里确定车辆的实时位置,与实际位置的偏差应小于20m;
(2)系统能将车辆的实时位置转化为地图坐标与道路网相匹配,以提供车辆在路网中最可能的行驶路段以及车辆在该路段中所处的位置;
(3)系统能向驾驶员提供以地图为背景的图形化实时车辆位置显示;
(4)系统能接受任务目的地请求,并按合适的规划标准给出由当前位置或指定地点到达目的地的最佳行车路径;
(5)系统能根据已规划好的行车路径产生实时的驾驶引导指令,并以图形指示或语音提示的方式提供给驾驶员;
(6)系统能确定车辆当前是否已经偏离了预定行车路径并及时作出处理,或者以语音或图形方式提醒驾驶员注意,或者从当前位置开始重新规划行车路径。
(一)车载终端硬件设计
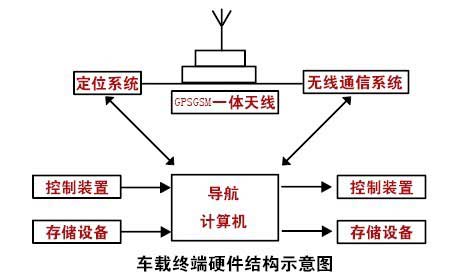
导航计算机是本导航系统硬件体系的核心部分,除定位和通信外,系统的其他功能模块都以导航计算机为硬件平台,通过应用软件来实现;用户对整个系统的操作和控制也通过导航计算机来完成。系统的硬件结构如下图所示。
导航计算机必须要具备足够的运算能力,具备基本的多媒体功能,具备强大的控制和通信能力,以及良好的扩充性,还需具备良好的抗震性能。为实现上述要求,本文在车辆导航系统中采用了嵌入式导航计算机系统设计方案,如下图所示。
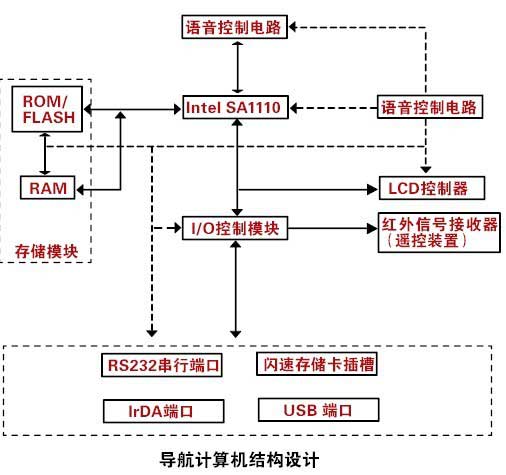
与传统的计算机体系相比,嵌入式系统去掉了对大量不必要工业总线标准的支持,因此部件较少,结构也更加紧凑。中央处理器选用的是Intel SA1110精简指令(RISC)芯片,时钟频率高达206MHz,具备相当于133MHz奔腾处理器的强大运算能力。处理器内置了语音编码和解码、通信协议和端口控制等功能电路,配合少量的外围电路即可完成相应功能。系统使用的存储设备有两种:RAM(随机存储器)和ROM/FLASH(只读存储器/闪速存储器)。前者用于在系统工作时加载和运行应用程序,后者用于保存程序和数据。由于没有使用硬盘和CD-ROM驱动器这样的靠快速移动的机械装置读取数据的存储设备,因此系统的抗震能力大为增加。为加强图形显示功能,系统配有专门的LCD控制电路,支持16位真彩色显示模式。考虑到功能扩展和与其他设备通信的需要,系统配备了1个串行通信端口、1个红外数据(IrDA)端口、1个闪速存储卡(Compact Flash Card)插槽和1个通用串行总线(USB)接口。数字地图数据存放在存储卡中,更换起来非常方便。为了加强对功耗的控制,系统中有专门设计的电源管理模块负责对中央处理器、存储模块、I/O设备和LCD电源实行供电控制。系统采用按键式红外遥控器作为用户指令与数据的输入设备,同时还在LCD显示屏上装有触摸面板。
(二)软件体系设计
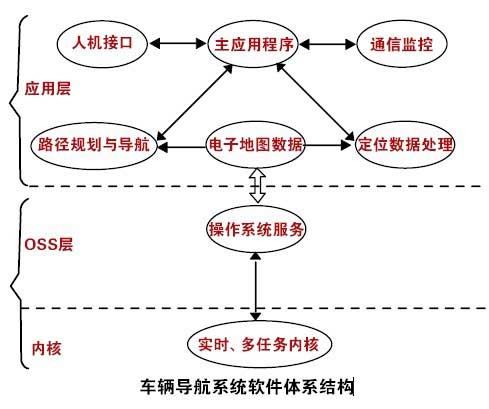
根据系统功能的要求,本导航系统的软件体系可划分为如下图所示的层次结构。其中操作系统由内核层和系统服务层组成,为应用软件提供运行支持。为满足实时处理的需要,操作系统应支持多任务特性,即允许多个独立的应用程序同时运行。内核是指操作系统中直接与硬件交互的部分,主要由硬件驱动程序组成,它是整个软件体系中唯一与具体硬件相关的部分。系统服务(OSS)层介于应用层与内核之间,它向应用层提供任务创建、内存分配、磁盘读写缓冲区创建与管理、创建消息队列、启动任务循环、事件监测等基本操作系统服务。导航系统的主要功能如定位数据处理、路径规划与导航、数字地图数据库操作等都由对应的应用层软件模块完成。
在软件体系中采用分层结构使得应用层软件具有硬件无关性,即不依赖于具体硬件的独立性。这种无关性有两层含义:第一,系统中所有的硬件设备都由操作系统接管,应用程序不直接对硬件进行访问;第二,所有涉及硬件的操作都通过调用标准的API(应用程序接口)函数来完成。硬件无关性极大地增强了应用程序的可移植性,为系统的软硬件开发、升级和改进带来了方便。 责编/吴 浪