蝎子拥有强有力的钳子和尾巴,可以轻易致敌于死地,并且其双钳灵活自如,尾巴更时刻处于戒备状态。我们根据真实蝎子的运动特点设计出了一款“蝎型机器人”。目的是将蝎子的一些习惯、行为、反应生动的表现出来,将蝎子的每一个关节活灵活现地用机械来表达,也希望借此机会向人们展示自然界的神奇。
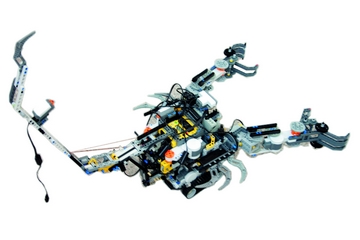
蝎型机器人主要由10个马达、3个主机、2个触碰传感器、1个超声波传感器、若干个乐高积木、皮筋和细绳等构成。
利用马达的灵活性构成蝎型机器人的关节部位,细绳和皮筋的结合构成了蝎型机器人的尾巴。通过对力学仿生的研究并模仿生物体形态、结构、力学性质(包括运动学、静力学和动力学),成功地研制出“蝎型机器人”。“蝎型机器人”具有远距离行进和高质量完成近距离行进抓取任务,并能准确判断障碍物,进行避让,或者对其进行攻击等功能。蝎型机器人成功实现机械臂(胳膊)的上下、左右的灵活运转,机械手的张开、闭合,通过上述动作完整完成抓取任务,并且实现了各个角度的抓取,以及辨别抓取。
第一代“蝎型机器人”由于初步设计以及搭建比较粗糙,于是我们决定对第一代“蝎型机器人”进行改进,改进具体内容包括以下几个方面。即:1.增添2个NXT主机,去掉原有的一个RCX主机,这样可以改正RCX无法控制马达转动角度的漏洞,可以实现NXT主机之间的沟通,实现远程蓝牙遥控,并且可以使蝎子的外观更加完美。2.将蝎子尾部进行改进。原来制作的蝎子尾部需要靠一个马达将绳子缠绕,将皮筋拉长,从而做到蝎子尾部的折叠,在弹起时,马达反转,通过皮筋的弹力将尾部拉起。但这样会导致尾部下降过慢,与蝎子攻击敌人时的速度不符,在改动当中,将会把皮筋与细绳反置,以提升速度。3.将蝎子底盘由履带驱动改为六足前进。由于原来的履带驱动比较不成熟,蝎子走路时明显不像蝎子,所以决定用六足式前进,并且加大马力。4.将程序进行大改动。原来的蝎子机器人完成的任务较单一,动作也不成熟,在改进过程中将增加更多的添入任务,动作。5.添入更多的传感器。由于初步研制的蝎型机器人功能较为简单,所以用到的传感器只有3个。在改进中,将会添加更多的触碰传感器,颜色传感器等,使其功能更为全面。
“蝎型机器人”所具有的创新性:是一款典型的模仿人类的躯体和四肢的组织结构,具有静步态和动步态下的力学特性。设计中并没有非常死板地模仿蝎子的各种行为,而是在模仿的基础之上添加了一些新元素,比如将机器蝎子“驯化”,让其完成一些人类需要的任务。
“蝎型机器人”所具有的实用性:实现了蝎子可以进行六足行走,完成抓取的基本任务,可以独立较远距离行进,并且感受障碍物,进行绕路行进,增加对障碍物的判断准确度。所研制的蝎型机器人一方面做到了仿生,一方面可以完成一些人类无法完成或不方便完成的工作,利用其特有的功能帮助人类。